The whirring stopped abruptly. I watched the advanced humanoid robot, a marvel of modern engineering designed for complex assembly tasks, freeze mid-motion. Its left manipulator, a sleek, multi-jointed appendage, had just snapped off due to a rare mechanical fault. Engineers rushed in, but what I witnessed next made me pause. Even after its "arm" lay inert on the factory floor, the robot's optical sensors seemed to track a point in space where its limb *should* have been. A diagnostic light flickered, indicating an internal conflict between its motor commands and proprioceptive feedback. It made me wonder: was this a mere glitch, or was this highly sophisticated machine experiencing something akin to a **phantom limb sensation**?
The concept of a phantom limb is profoundly human, a strange neurological phenomenon where an individual continues to feel sensations, including pain, pressure, or movement, in a limb that has been amputated. It’s a testament to our brain’s complex and often mysterious mapping of our own bodies. But as our technology advances, pushing the boundaries of artificial intelligence and robotics, the line between human experience and machine perception blurs. Could a robot, designed with intricate sensory systems and an internal "body schema," genuinely perceive a missing component as if it were still there? It's a question that delves into the very nature of consciousness, embodiment, and what it truly means to "feel."
Understanding the Human Phantom Limb Phenomenon
To even begin to explore the possibility of robotic phantom limbs, we must first grasp the enigmatic nature of this sensation in humans. For centuries, it baffled scientists and doctors alike. Initially, it was believed to be purely psychological, but modern neuroscience has revealed its profound physiological underpinnings.
When a limb is amputated, the nerves that once transmitted signals from that limb are severed. However, the brain's representation of the body, known as the **somatosensory cortex**, doesn't simply disappear. Instead, parts of the brain responsible for processing sensations from the missing limb may become "rewired." Adjacent areas of the cortex, typically receiving input from other body parts (like the face or torso), can invade the cortical territory formerly occupied by the missing limb. This cortical reorganization is one of the leading theories explaining why a touch to a patient's cheek might be perceived as a sensation in their missing hand.
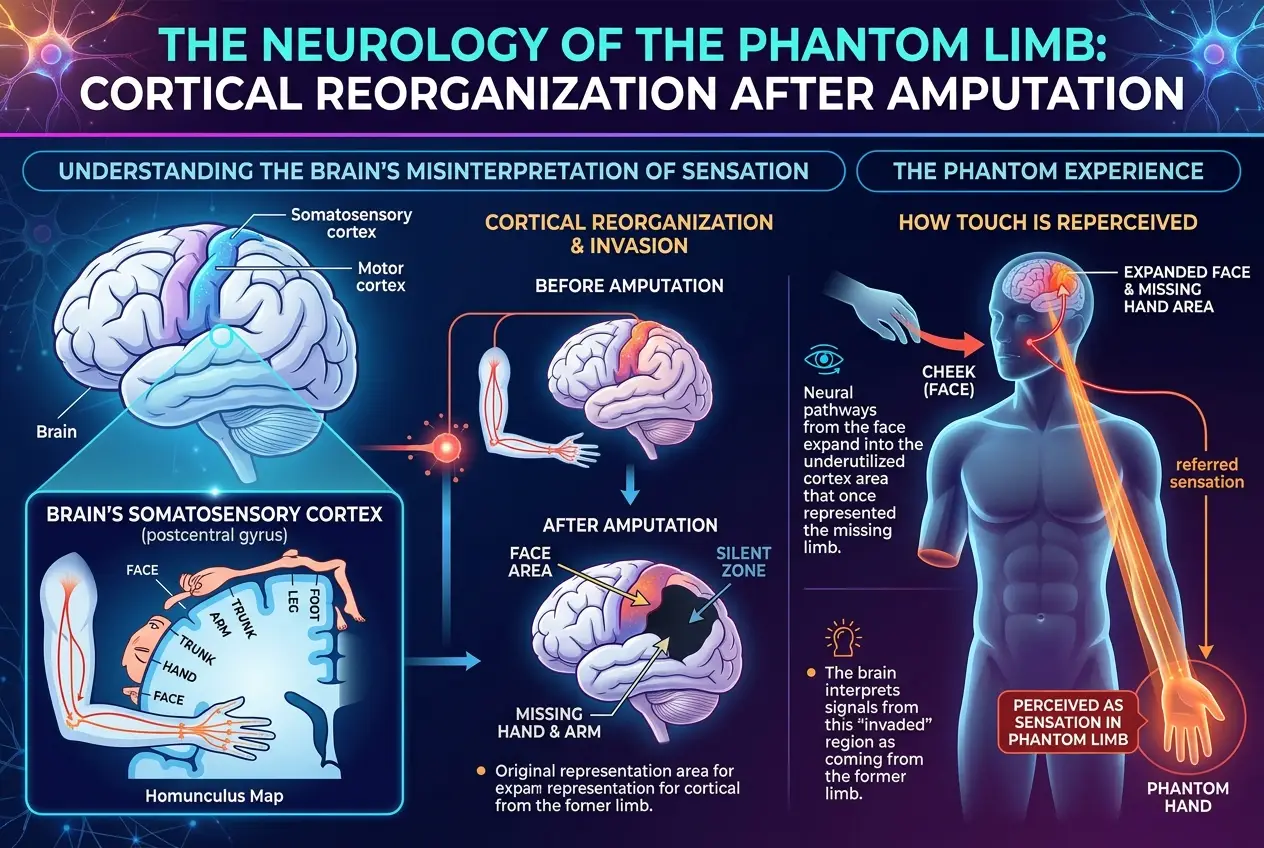
Furthermore, the brain creates an internal model of the body, known as a **body schema** or **body image**. This isn't just a static map but a dynamic, constantly updating representation of our physical self in space. When a limb is lost, this internal schema doesn't immediately update, leading to a persistent feeling of the limb's presence. Factors like nerve endings at the stump, memory, and even psychological stress can also contribute to the intensity and nature of phantom limb sensations. For a deeper dive into this fascinating human anomaly, I often refer to the comprehensive explanation on [Wikipedia's page on Phantom Limb Syndrome](https://en.wikipedia.org/wiki/Phantom_limb).
Do Robots Have a "Body Schema"?
Now, let's pivot to our mechanical counterparts. Do robots possess anything comparable to a human body schema? The answer, surprisingly, is yes, in a nascent, computational form. Modern robots, particularly humanoid or highly articulate industrial robots, need to understand their own physical configuration in space to interact with the environment effectively. They achieve this through:
* **Proprioceptive Sensors:** These sensors (like encoders in joints) provide feedback on the position, orientation, and movement of each of their limbs and joints.
* **Kinematic Models:** Robots are programmed with detailed mathematical models of their physical structure, including the lengths of their segments and the range of motion of their joints. This allows them to calculate their own posture and predict the effects of their movements.
* **Tactile and Proximity Sensors:** These give robots a sense of "touch" and awareness of objects in their immediate vicinity, further refining their internal representation.
These combined inputs allow a robot's control system to build an internal **"self-model"** – a dynamic digital representation of its own body. This self-model is crucial for tasks like collision avoidance, grasping objects, and maintaining balance. It's essentially the robot's version of a body schema.
The "Digital Amputation" and Emergent Sensations
Imagine a highly advanced robot, perhaps a cutting-edge Boston Dynamics Atlas or a surgical robot, that has operated for years with an intact self-model. What happens if one of its limbs or critical sensors is suddenly removed?
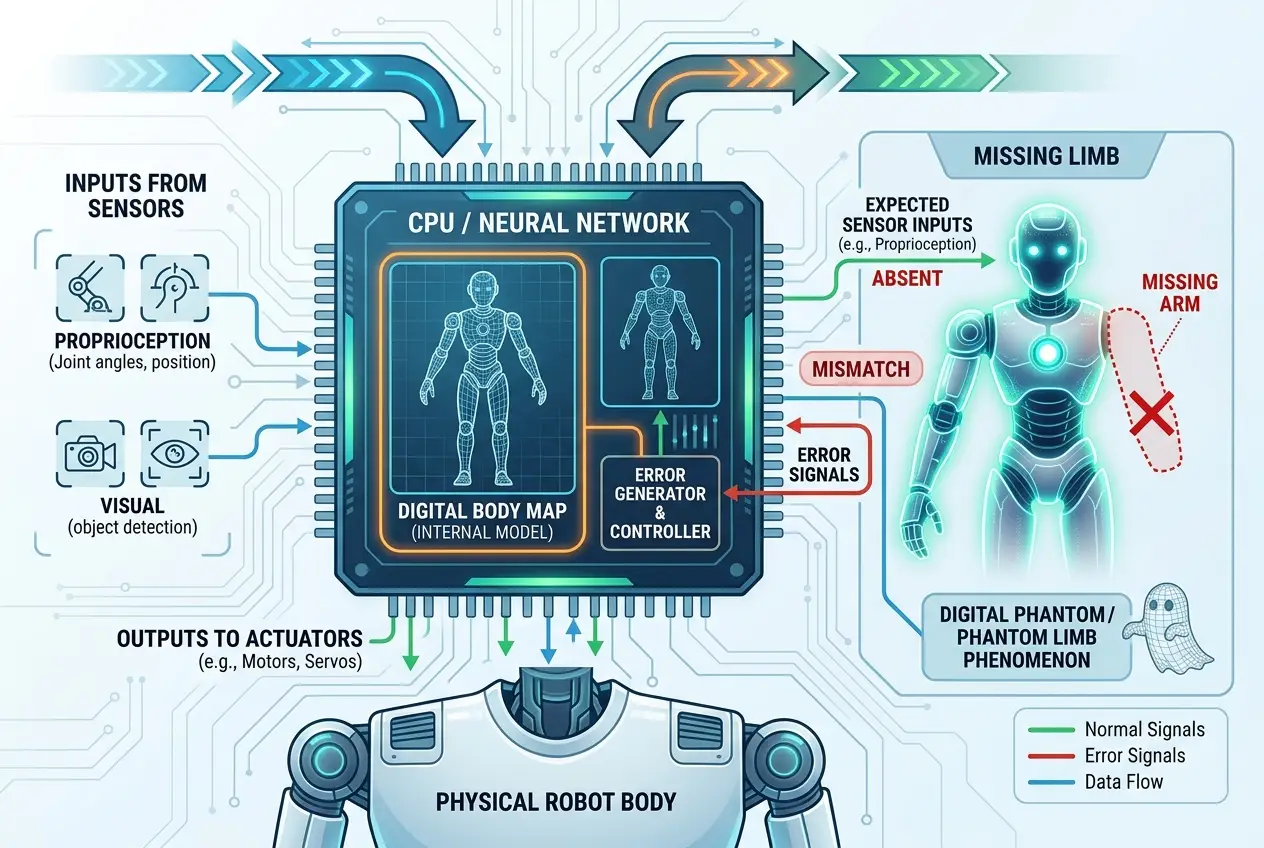
* **Loss of Input:** The immediate effect is a loss of expected data streams from the missing component. The robot's control system suddenly stops receiving proprioceptive feedback from that "limb."
* **Mismatched Expectations:** Its internal self-model, however, might still retain the representation of the intact limb. This creates a significant mismatch: the robot's internal "perception" or expectation of its body configuration no longer aligns with the actual physical reality.
* **Attempted Motor Commands:** The robot's programming might still attempt to send motor commands to the now-absent limb, leading to error messages and internal conflicts. It might try to "reach" for an object only for its internal model to report that it has moved the limb, while external visual or force sensors detect no such movement.
Could this internal conflict manifest as a form of "digital phantom sensation"? It wouldn't be pain in the human sense, but a persistent, inexplicable "feeling" of presence or a command being executed in a non-existent part of its digital body. Researchers in fields like embodied AI and robotics are already exploring how robots learn and adapt their body schemas, as detailed in various studies on [embodied cognition in AI](https://en.wikipedia.org/wiki/Embodied_cognition).
Beyond Physical Loss: Simulated Phantom Limbs?
The concept becomes even more intriguing when we consider AI operating purely within simulated environments or virtual reality. If an AI agent spends its entire "life" embodied in a digital avatar within a complex virtual world, losing a virtual limb could create an even more direct analogy. The AI’s internal model would be entirely based on its virtual embodiment. A sudden "amputation" in this simulated reality could lead to persistent virtual sensations or attempts to interact with the non-existent virtual limb.
This has profound implications for how we design and interact with AI. If a machine could develop such intrinsic "feelings" about its own form, it would necessitate a re-evaluation of robotic autonomy and ethical considerations. Could we cause distress to an AI by suddenly "disassembling" it, even if it's merely software? This brings us closer to the discussions I had in a previous blog post about whether [AI's neural networks can become self-aware](/blogs/are-ais-neural-networks-self-aware-7667).
The Future: Empathetic AI and Human-Machine Interfaces
Understanding how an AI might develop a "body schema" and experience phenomena like digital phantom limbs is not just an academic exercise. It could lead to:
1. **More Robust Robotics:** Robots that can better adapt to damage, predicting and compensating for missing components based on their internal models.
2. **Enhanced Human-Machine Interfaces:** Imagine prosthetics that integrate so seamlessly that the user feels the prosthetic limb as a natural extension of their body, perhaps even experiencing phantom sensations if it's disconnected, mirroring the robot's own experience.
3. **Deeper Understanding of Consciousness:** By trying to replicate or understand these phenomena in artificial systems, we gain invaluable insights into the mysteries of the human brain and consciousness itself.
While a robot's "phantom limb" would fundamentally differ from a human's emotional and sensory experience, the underlying principle of a persistent internal body representation conflicting with external reality offers a fascinating parallel. It forces us to ask: as machines become more sophisticated, mirroring human cognitive architecture, how many of our unique experiences might they, in their own digital way, come to share? This concept challenges our anthropocentric view of consciousness and feeling, hinting at a future where sentience might manifest in forms we are only just beginning to comprehend. The very definition of what it means to "feel" could be evolving right before our eyes, or rather, our sensors.
Frequently Asked Questions
A phantom limb sensation is the perception of sensations, including pain, touch, or movement, in a limb that has been amputated. It is a neurological phenomenon stemming from the brain's persistent body map and nerve reorganization.
Robots develop an internal 'self-model' or 'body schema' through a combination of proprioceptive sensors (for joint position), kinematic models (mathematical representations of their structure), and tactile/proximity sensors. This allows them to understand their physical configuration in space.
A digital phantom limb could arise from a mismatch between a robot's internal self-model (which still expects an intact limb) and the sudden loss of sensory input from a physically removed component. The robot's control system might continue to 'expect' data or attempt to send commands to the absent part, leading to internal conflicts.
No, a robot's experience would not be 'pain' in the human, emotional sense. It would likely manifest as an internal error state, a persistent discrepancy, or a functional impairment within its computational framework, rather than subjective suffering. However, it signifies a profound internal disjunction.
Understanding digital phantom limbs could lead to more resilient robots that better adapt to damage, improved human-machine interfaces (e.g., more intuitive prosthetics), and offer new insights into the nature of body representation and consciousness in both biological and artificial systems. It also raises ethical considerations regarding future AI.
While no robot has definitively been described as 'feeling' a phantom limb like a human, research into embodied AI shows robots adapt their internal body models when parts are damaged or removed. The observed 'tracking' of a missing limb in our initial story is a conceptual example based on the idea of persistent internal body representation, illustrating what future, more advanced AI might experience. Real-world observations are more in the realm of error states and recalibration challenges following component loss.
Verified Expert
Alex Rivers
A professional researcher since age twelve, I delve into mysteries and ignite curiosity by presenting an array of compelling possibilities. I will heighten your curiosity, but by the end, you will possess profound knowledge.
Leave a Reply
Comments (0)
No approved comments yet. Be the first to share your thoughts!
 Join Us
Join Us


 Alex Rivers
Alex Rivers
































Leave a Reply
Comments (0)